

















































Embedded industrial controllers realize real-time control and data processing through real-time operating systems, fast data acquisition and processing, real-time communication and network protocols, real-time control algorithms and logic, data storage and processing. This enables the industrial control system to respond quickly to external signals and events, and to make immediate control and decision-making to meet the real-time requirements of industrial production.
The key to realizing real-time control and data processing of embedded industrial controllers is the combination of hardware and software.

The following is the general realization:
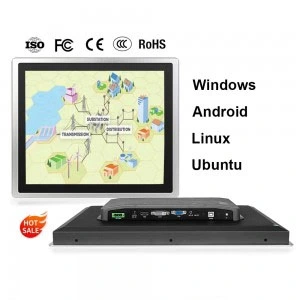
1. Real-time operating system (RTOS): Embedded industrial computer usually uses a real-time operating system to manage tasks and resources to ensure timely response and priority scheduling of tasks, RTOS has a low latency and predictability to meet the needs of real-time control.
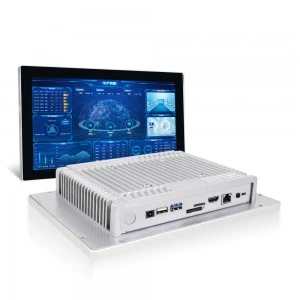
2 fast response hardware: embedded industrial control machine hardware often choose high-performance processors and specialized hardware modules to provide fast data processing and response capabilities. These hardware modules may include digital signal processor (DSP), real-time clock (RTC), hardware timers and so on.
3 real-time communication interface: embedded industrial computer needs to communicate with other devices in real time, such as sensors, actuators, etc., commonly used communication interfaces are Ethernet, CAN bus, RS485, etc., these interfaces have a high data transfer rate and reliability.
4, data processing algorithm optimization: in order to improve the speed and efficiency of data processing, embedded industrial computer will usually optimize the data processing algorithm. This includes the use of efficient algorithms and data structures, reducing the meta-computation and memory consumption to improve system performance.
5, real-time scheduling and task management: RTOS will be based on the priority of the task and time constraints, real-time scheduling and management of tasks, through reasonable task allocation and scheduling algorithms, embedded industrial controllers Yu enough to ensure that the real-time and stability of the critical tasks.
In general, embedded d-controller through the combination of hardware and software using real-time operating systems, fast response hardware, real-time communication interfaces, processing optimization and real-time scheduling and task management to achieve real-time control and data processing requirements. This enables the D-control system to efficiently and stably control and externalize the real-time data of a large scene.

Penny
Web Content Writer
4 years of experience
This article is edited by Penny, the website content writer of COMPT, who has 4 years working experience in the industrial PCs industry and often discusses with colleagues in R&D, marketing and production departments about the professional knowledge and application of industrial controllers, and has a deep understanding of the industry and products.
Please feel free to contact me to discuss more about industrial controllers. sales@gdcompt.com







