
















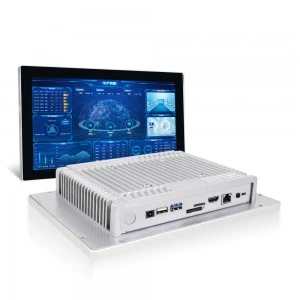










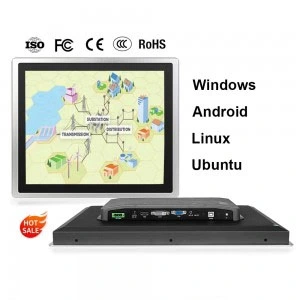























In recent years, with the rapid development of e-commerce, the warehousing industry is facing higher and higher transportation demand. In order to improve transportation efficiency and reduce labor costs, many warehousing companies have begun to use intelligent technology, in which industrial control machine and AGV mobile robot has become a popular choice. Industrial control machine is a kind of high-performance computer equipment, with strong processing power and stability. It can realize automation control through linkage with other equipment, effectively improving transportation and processing efficiency.
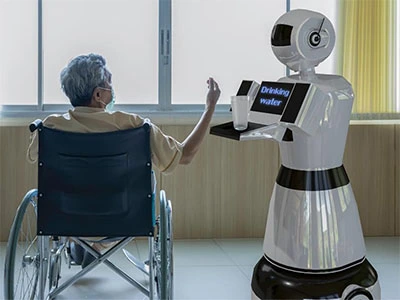
AGV mobile robot, on the other hand, is a kind of automated navigation transportation vehicle, which can be moved and handled according to preset paths or instructions. Combining the two, warehousing enterprises can achieve intelligent transportation management, greatly improving transportation efficiency. The advantage of the integration of industrial controllers and AGV mobile robots lies in their flexible transportation solutions. Traditional transportation methods often rely on manual handling, which is not only time-consuming

and laborious, but also prone to negligence and errors. With the precise control of the ICPC and the automated operation of the AGV mobile robot, warehousing companies can achieve high-speed transportation and accurate positioning of goods, thus greatly improving the overall transportation efficiency.
Moreover, the use of industrial control machine and AGV mobile robot can also realize the upstream and downstream seamless connection. The industrial control machine can interact with the warehouse management system, logistics systems and other data, through real-time monitoring and scheduling, to provide the accuracy and real-time transportation and logistics information. AGV mobile robot can communicate directly with the industrial control machine, according to the instructions for moving and handling, greatly reducing the time and distance of logistics transportation. Such a seamless connection allows all aspects of the warehousing industry to work together more smoothly, further enhancing transportation efficiency.

In terms of automated warehouse management, the intelligent collaborative application of industrial control machine with AGV mobile robot plays an important role. Industrial control machine can be based on real-time data analysis and intelligent algorithms for job scheduling, reasonable arrangement of AGV mobile robot work path and task allocation, reducing the risk of manual intervention and misoperation.
At the same time, AGV mobile robots can also provide real-time detection and monitoring of the status of goods by carrying sensors and cameras to ensure the stability and reliability of the transportation process.
The application of industrial controllers and AGV mobile robots has attracted widespread attention and adoption in the warehousing industry. It not only greatly improves the transportation efficiency, but also reduces the labor cost and transportation risk, which brings a huge competitive advantage for warehousing enterprises. With the continuous development of intelligent technology, I believe that the intelligent application of industrial control machine and AGV mobile robot will continue to play an important role in the future, and promote the warehousing industry to a higher level of development.

Penny
Web Content Writer
4 years of experience
This article is edited by Penny, the website content writer of COMPT, who has 4 years working experience in the industrial PCs industry and often discusses with colleagues in R&D, marketing and production departments about the professional knowledge and application of industrial controllers, and has a deep understanding of the industry and products.
Please feel free to contact me to discuss more about industrial controllers. sales@gdcompt.com







